A NES Rumble Pak
Recently, I participated in Oregon State University’s Engineering Expo. Every year, freshmen are encouraged to enter innovative designs based on the TekBot learning platform used in the ECE program.
A friend and I decided that we would try to implement a macro system for the robot: by using an NES controller, we could have the robot record button combinations and sequences, then play them back later.
Boy did we learn a lesson about procrastination. We started working 24 hours before the project was due, and only ended up getting it finished at 2 in the morning. We ended up having to scale back our plans. But not too much. What we built still is awesome.
We decided to scale back and just put a rumble pack in the controller.
For those of you that don’t know, the NES controller is implemented pretty simply in hardware:
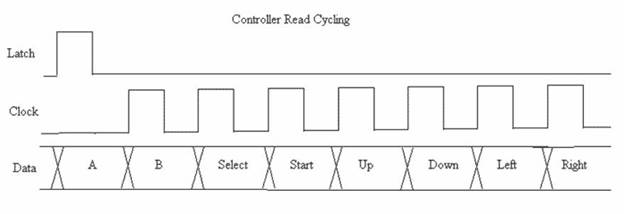
The NES controller grabs the state of all 8 buttons: Up, Down, Left, Right, Start, Select, A, and B, when the Latch line is pulled high on the controller. Then, whenever it sees a low-to-high transition on the Clock line, it sets the corresponding’s button’s value on the Data Line.
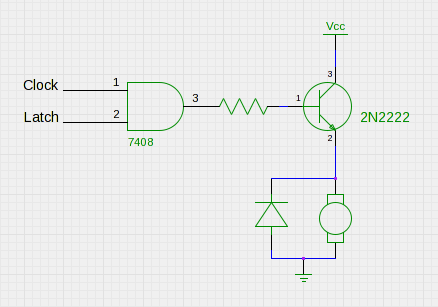
In order to make the controller rumble, we need two things: a physical vibration device, and a way to control when the controller rumbles.The physical vibration device isn’t too hard. We modeled our’s after the vibrating alert in a cellphone. We soldered a screw to the output shaft of a small DC motor I found in my junk drawer.
Controlling when the motor ought to turn on was a harder challenge. If you look carefully at the above diagram of the NES timing sequence, you will notice that Latch and Clock, the two lines controlled by the robot, are never high at the same time. This is because, when the latch line is high, the NES controller disregards the Clock line. We can take advantage of this fact to transmit a single bit of information to the NES controller: Latch AND Clock. When both lines are high, the motor ought to spin.
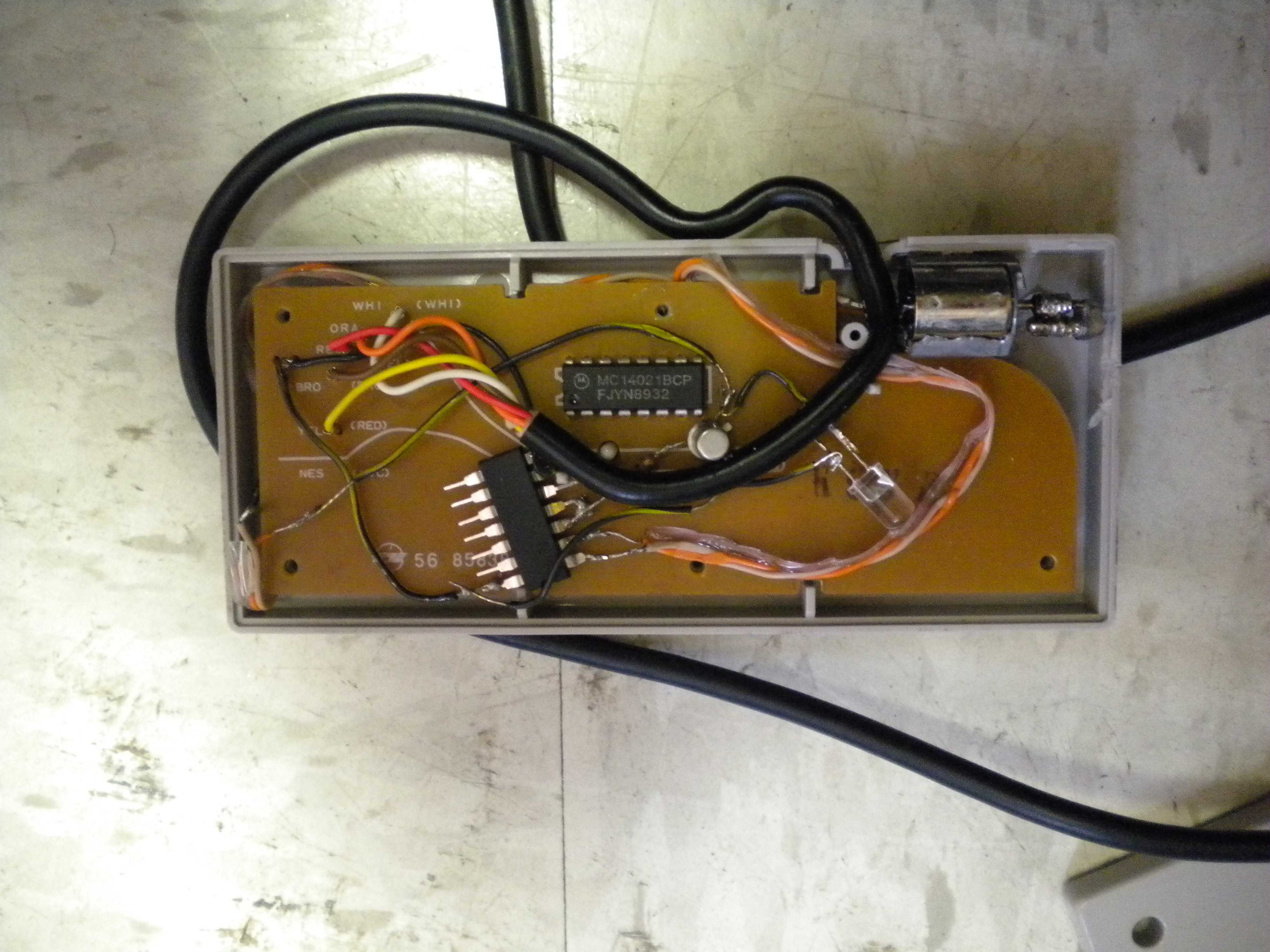
This has the obvious disadvantage that we cannot read the values of the controller when the pack is rumbling. On the plus side however, you have a vibrating controller! Here’s a picture of the circuitry crammed into an NES controller:
The code for the robot was written in C for an AtTiny26. You can find an example implementation here.